- 廠家供應
- 大量現貨
- 可開發票
服務熱線:
18691898759服務熱線:
18691898759
產品分類
Products 更新時間:2025-08-21
更新時間:2025-08-21  瀏覽次數:59
瀏覽次數:59軟機器人技術近年來在學術界和工業界都受到了廣泛的關注。與傳統的剛性機器人相比,軟機器人由柔軟的材料(如凝膠或彈性體)組成,這使得它們在某些應用場景中具有特別的優勢。例如,在醫療領域,軟機器人可以更安全地與人體交互,減少對患者的傷害;在探索復雜環境時,軟機器人的柔軟性使它們能夠更容易地適應各種形狀和障礙物。電液驅動器是一種將電能轉化為液壓能,進而產生機械運動的裝置。在軟機器人中,電液驅動器可以通過控制液壓系統的壓力來驅動機器人的運動。這種驅動器具有輸出力大、響應速度快等優點,非常適合用于需要大力矩或快速響應的軟機器人系統中。
安泰電子的ATA-7000系列高壓放大器基于采用AB類放大電路,具有低失真、高穩定的特點。其最大帶寬可達120kHz,最大輸出電壓可達40kVpp,廣泛應用于各類壓電材料、鐵電材料、電活性材料測試及性能評估。
實驗名稱:基于粘附控制的電液驅動器蠕蟲狀軟機器人研究
實驗原理:電液驅動器通常由柔性電極、可變形電介質囊以及囊內電介質液體組成。在高壓環境下,兩個電極分別產生正負電荷,形成充電電容。高壓產生的麥克斯韋應力使得電極壓縮電介質囊,并將動能傳遞至內部液體,從而產生驅動力。這種電液流體動能(EFKE)驅動方式使得軟體機器人能夠實現快速且靈活的運動。
實驗框圖:

實驗過程:為了實現機器人的運動,建立了一個運動控制系統來激活四組執行器。驅動執行器所需的高壓由高壓放大器(Aigtek,ATA-7100高壓放大器)提供,該放大器放大來自函數發生器的電壓信號。每組獨立控制的柔性電極對應一個高壓繼電器,控制電壓和極性。為保證設備安全,高壓放大器的開/關由低壓繼電器控制。多路高壓驅動電路的上電順序由單片機信號控制。根據執行器模塊響應結果,選擇8kv的高壓,避免介質擊穿。
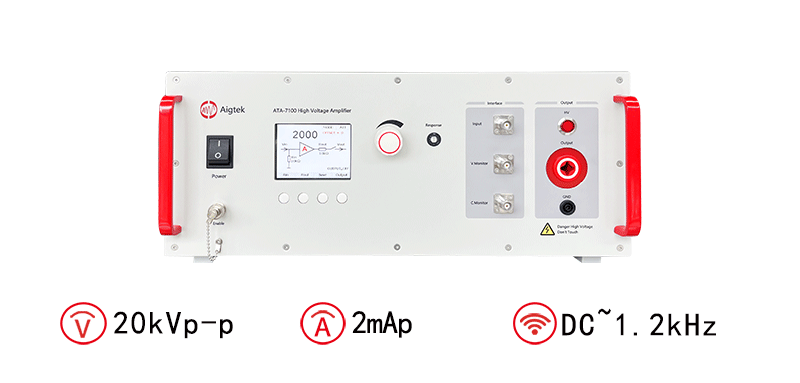
圖:ATA-7100高壓放大器指標參數
應用方向:藥物遞送、微創手術、精密制造、柔性生產線、多模態驅動與傳感、環境探測、災難救援
應用場景:粘附控制、電液驅動器、蠕蟲狀軟機器人、電活性材料、介電彈性體
產品推薦:ATA-7000系列高壓放大器

圖:ATA-7000系列高壓放大器指標參數
西安安泰電子是專業從事功率放大器、高壓放大器、功率信號源、前置微小信號放大器、高精度電壓源、高精度電流源等電子測量儀器研發、生產和銷售的高科技企業,為用戶提供具有競爭力的測試方案。Aigtek已經成為在業界擁有廣泛產品線,且具有相當規模的儀器設備供應商,樣機都支持免費試用。
 我的位置:
我的位置: